ROBOTIS open manipulator PRO






- Usuń ten produkt z moich ulubionych.
- Dodaj ten produkt do moich ulubionych
- Wyślij do znajomego
- Wydrukuj

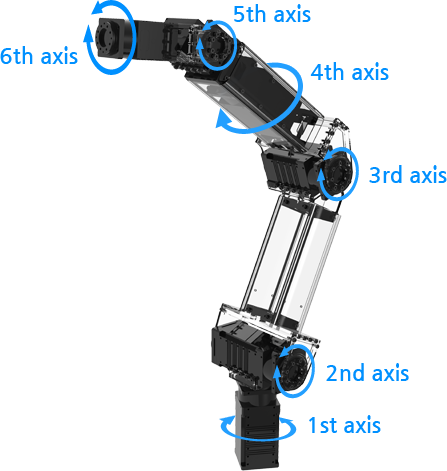
ROBOTIS open manipulator PRO
Multi-Purpose Affordable Manipulator for Research and Education.
Aby uzyskać szczegółowe informacje o cenach, skontaktuj się z nami telefonicznie lub mailowo.
+48 504 764 008
info@robosklep.com
+48 504 764 008
info@robosklep.com